
Capitalism: The Final Frontier!Geologists have recently found rich veins of a rare element on Mars - Obtainium, element 218. As engineers from the Carryer-Kenny Holdings corporation, we seek to design, build, and test a TRACTOR capable of moving MINERs across the pediment and securing the most deposits! However, we need to be wary; our chief compeititor, Gumerlock Heavy Industries, is roaming the terrain and seeking to out-mine and out-shine our TRACTOR. It's time to see who can make a real fortune on the unforgiving, yet colorful terrain of Mars!
|

|
Game Overview
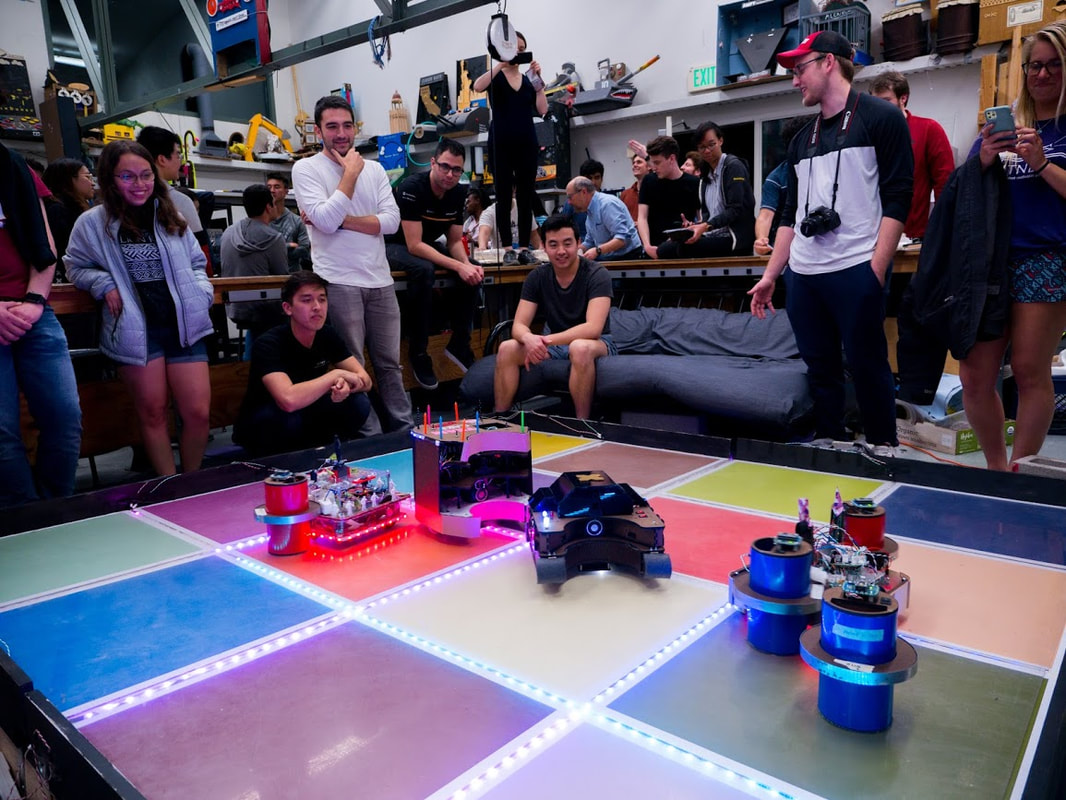
The objective of the project was to design and build an autonomous robot (TRACTOR) capable of transporting game pieces (MINERS) to designated scoring regions to accumulate points. The game board consisted of 16 uniquely colored squares arranged in a grid format. At any given point in the game, four of these squares were designated as scoring regions: one that can be exclusively used by red team, one that can be exclusively used by blue team, and two that can be used by either team. Points were awarded for the number of seconds that a single MINER was in the correct scoring region. Two robots competed over the course of a 2 minute and 18 second game to see which could accumulate the most points.

Our Robot
Our entire project was completed in a 3-week window and designed from scratch. The project budget was $220, which included all parts that made up the final version of the robot that competed.
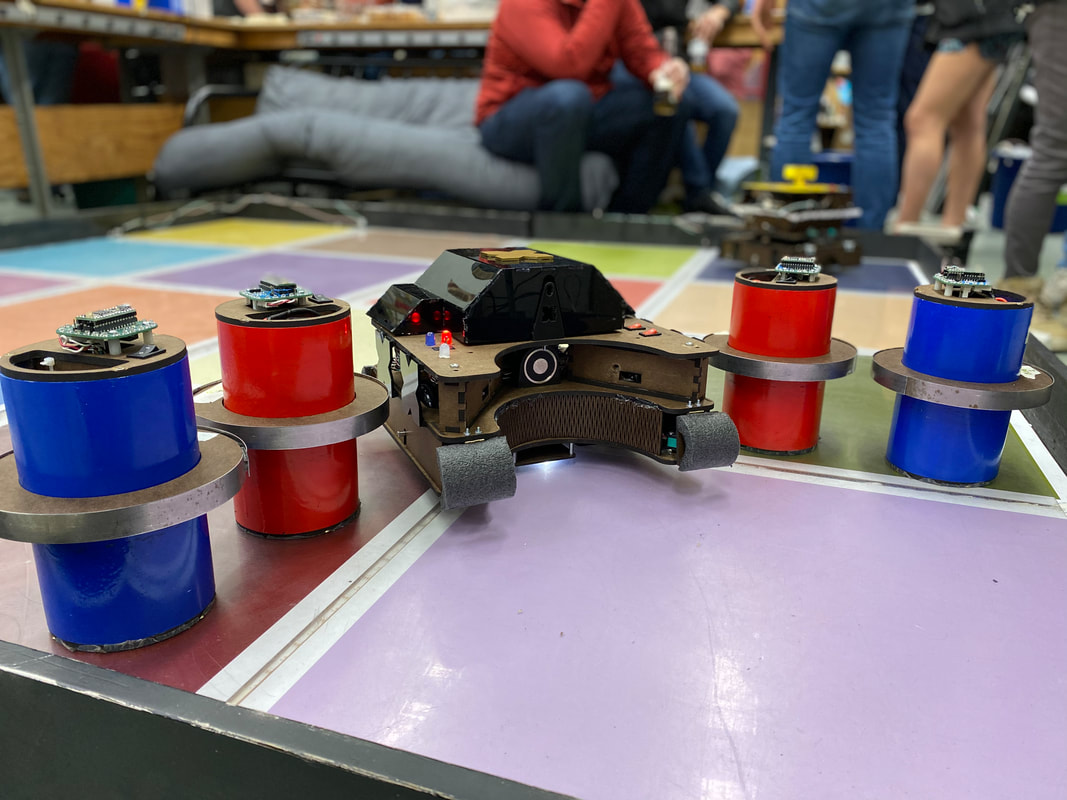
We designed our robot, the XTractor, to reliably transport our team's MINER's to our scoring regions and remove enemy MINER's from them. Our robot used a color sensor to determine its location on the board, an accelerometer to detect its orientation, an IR sensor to detect the IR pulses emitted by the MINERs, and an electromagnet to secure the MINER during transport. Our general strategy consisted of the following steps:
We designed our robot, the XTractor, to reliably transport our team's MINER's to our scoring regions and remove enemy MINER's from them. Our robot used a color sensor to determine its location on the board, an accelerometer to detect its orientation, an IR sensor to detect the IR pulses emitted by the MINERs, and an electromagnet to secure the MINER during transport. Our general strategy consisted of the following steps:
- Rotate and begin searching for the nearest MINER belonging to our team
- Once the MINER is found, drive forward towards it
- Once the MINER is within range of the electromagnet, activate it and latch on
- Query the SPUD to find the location of our primary scoring region (if it is unoccupied), or a neutral scoring region
- Calculate the appropriate angle, and orient the robot in that position
- Drive forward until the MINER is over the correct color, or until an encoder count is reached.
- Repeat steps 5-6 until the MINER is in the correct location, then release the MINER and back away.
- Repeat steps 1-7 for our team's other MINER.
- If at any time an enemy MINER is placed in our primary scoring region, remove it and drop it off in a corner
Results
Our robot performed well in the final competition, finishing as a semifinalist and holder of the second highest score in the competition. A video of our robot in action can be seen below.
